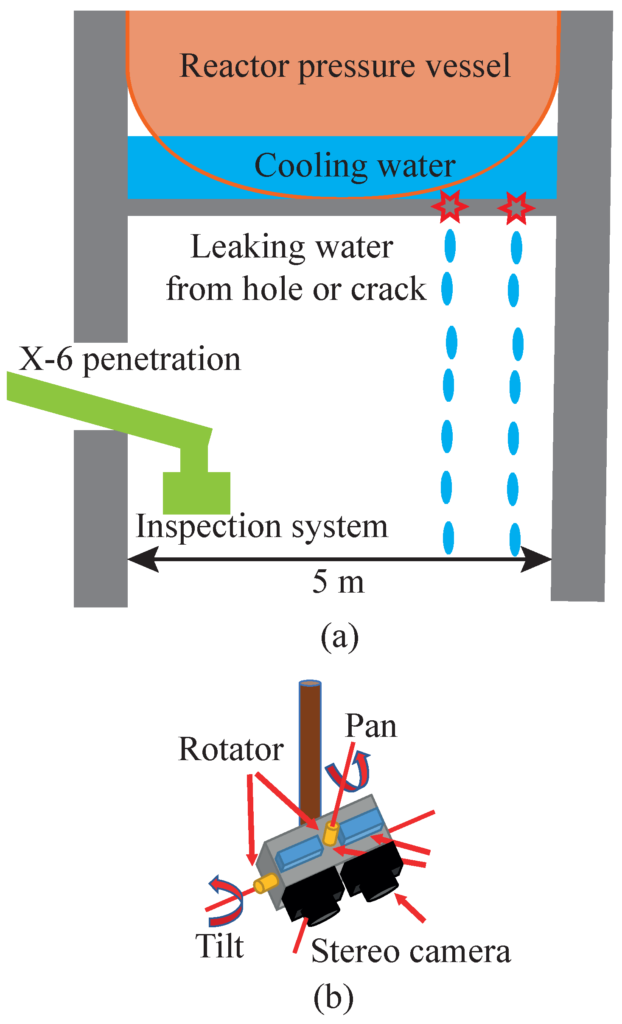
In this study, a new method of estimating the leakage positions of cooling water using a stereo camera for the Fukushima Daiichi Nuclear Power Plant (FDNPP) is proposed. A stereo camera mounted on an inspection system with a rotating base was inserted into the pedestal below the reactor pressure vessel (RPV), and the waterdrops from the leakage position were captured using a stereo camera. We estimated the leakage positions by triangulating the waterdrop trajectory lines in the stereo image. The main contribution of this study is the extraction and matching of the waterdrop trajectories in a stereo image in the FDNPP. The radiation noise is intense inside the pedestal because of the presence of fuel debris. Therefore, we propose a method that is robust against radiation noise. We assume that the waterdrops drip vertically in indoor environments without wind, such as in the FDNPP. Hence, the orientation of the stereo camera can be adjusted by the rotating base such that the vertical lines in the three-dimensional space are also projected as vertical lines in the image planes. Thereafter, the columns of pixels in the images are treated as image features and used to extract and match the waterdrop trajectories. We demonstrated the effectiveness of our leakage position estimation method in a simulated environment of the FDNPP with gamma-ray image noise.
Appl. Sci. 2021, 11(17), 7796; https://doi.org/10.3390/app11177796
Received: 24 July 2021 / Revised: 18 August 2021 / Accepted: 22 August 2021 / Published: 24 August 2021
(This article belongs to the Section Robotics and Automation)