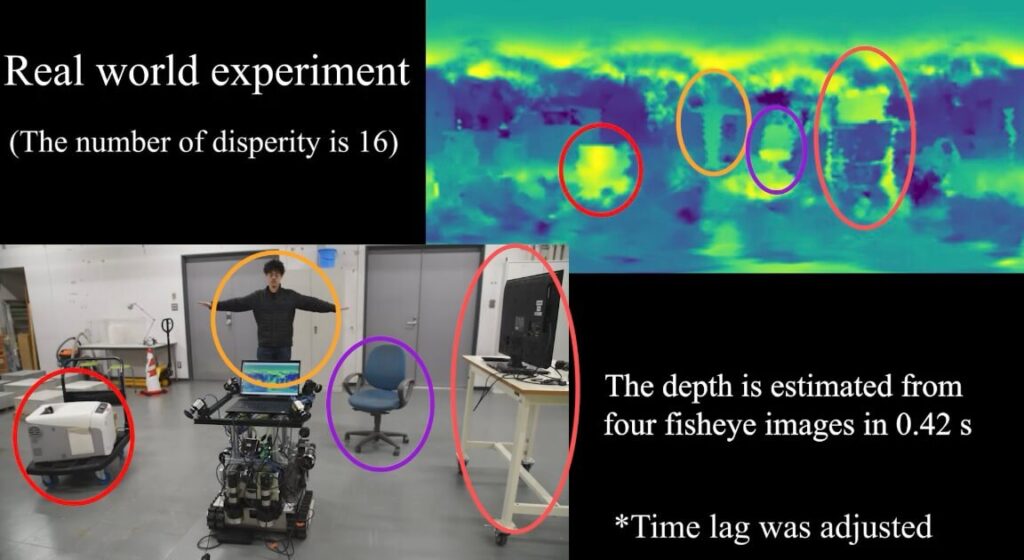
Depth estimation from multi-view images is useful for scene understanding and robot navigation. We work on 360 degree dense depth prediction using four fisheye cameras installed on a robot. To cope with the large distortion in fisheye cameras, we propose an icosahedron-based representation, and we employ icospherical sweeping to integrate the multi-view features into the 360 degree costmap.
We also focus on computational efficiency, so that the depth is estimated from four fisheye images in less than a second using a laptop with a GPU.
For further reading: