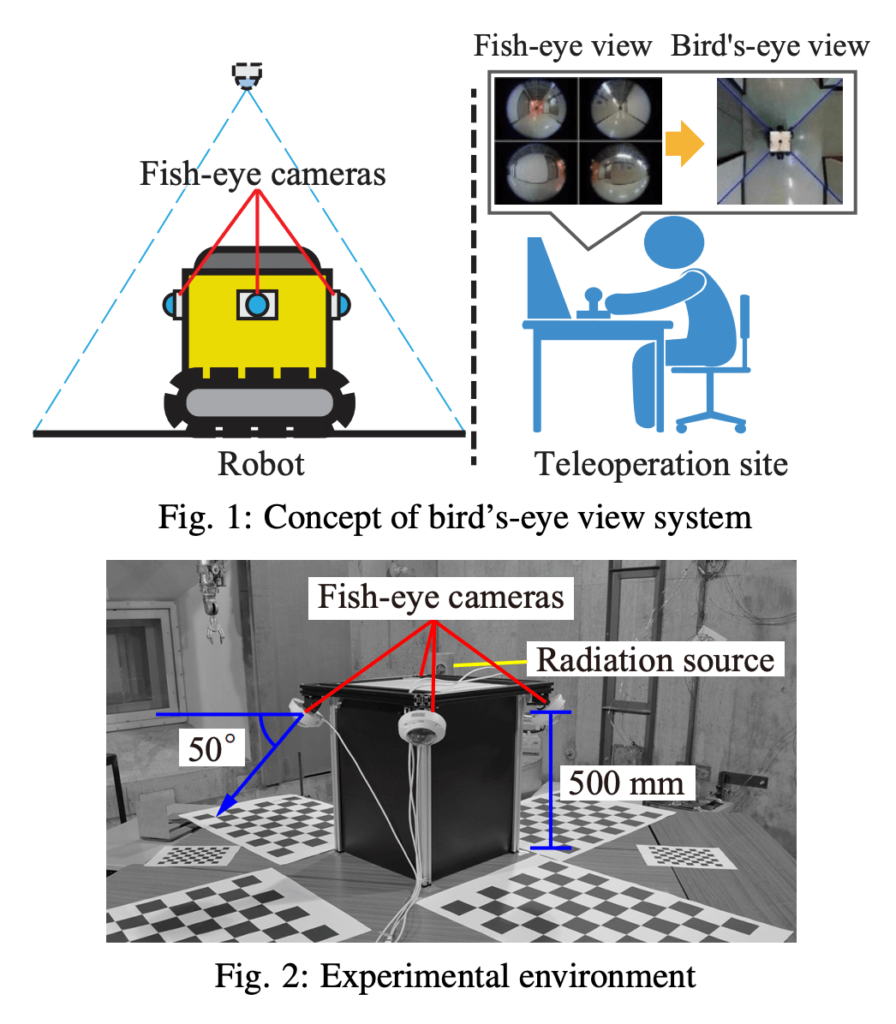
In this study, a gamma irradiation experiment for our proposed bird’s-eye view system was conducted. Experimental results show that cameras attached to our system malfunctioned one by one in the irradiation environment, and the proposed system generated bird’s-eye view images until all cameras malfunctioned.
URL: https://www.jstage.jst.go.jp/article/jsmeicam/2015.6/0/2015.6_177/_article